「PiLiDAR」は、シングルボードコンピューターのRaspberry PiとLiDARセンサーを活用した自作360度3Dパノラマスキャナーを開発するオープンソースプロジェクトで、比較的低コストで誰でも構築可能なポータブル3Dスキャンシステムを構築できます。
PiLiDAR/PiLiDAR
https://github.com/PiLiDAR/PiLiDAR
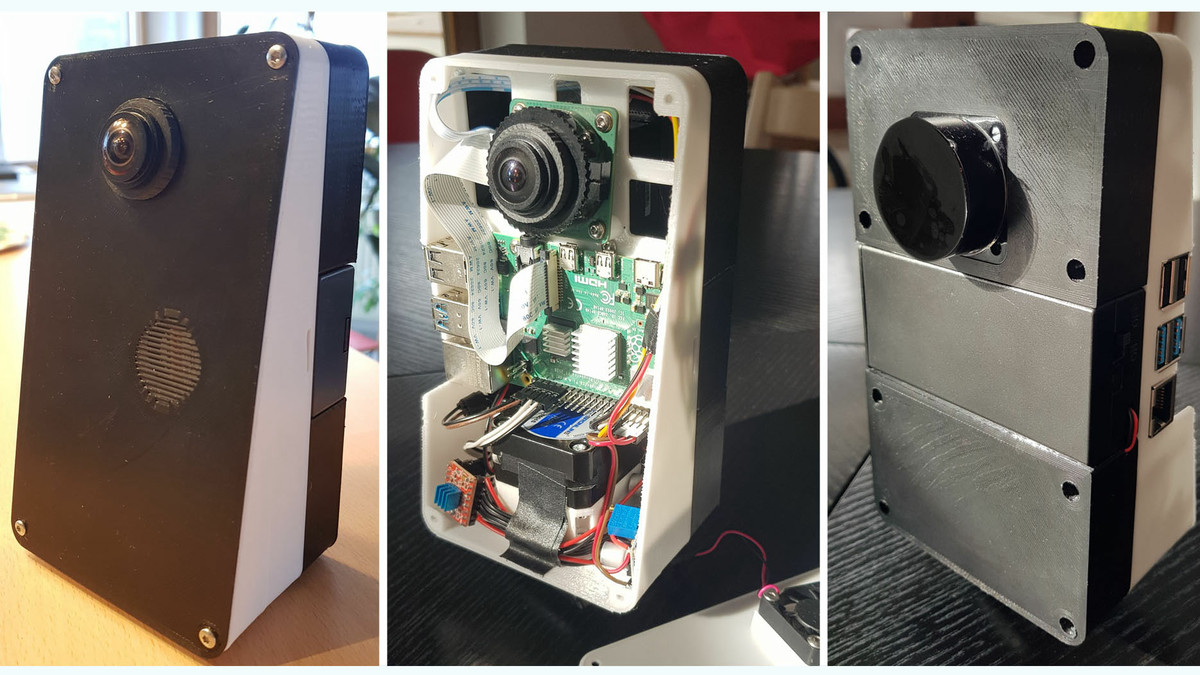
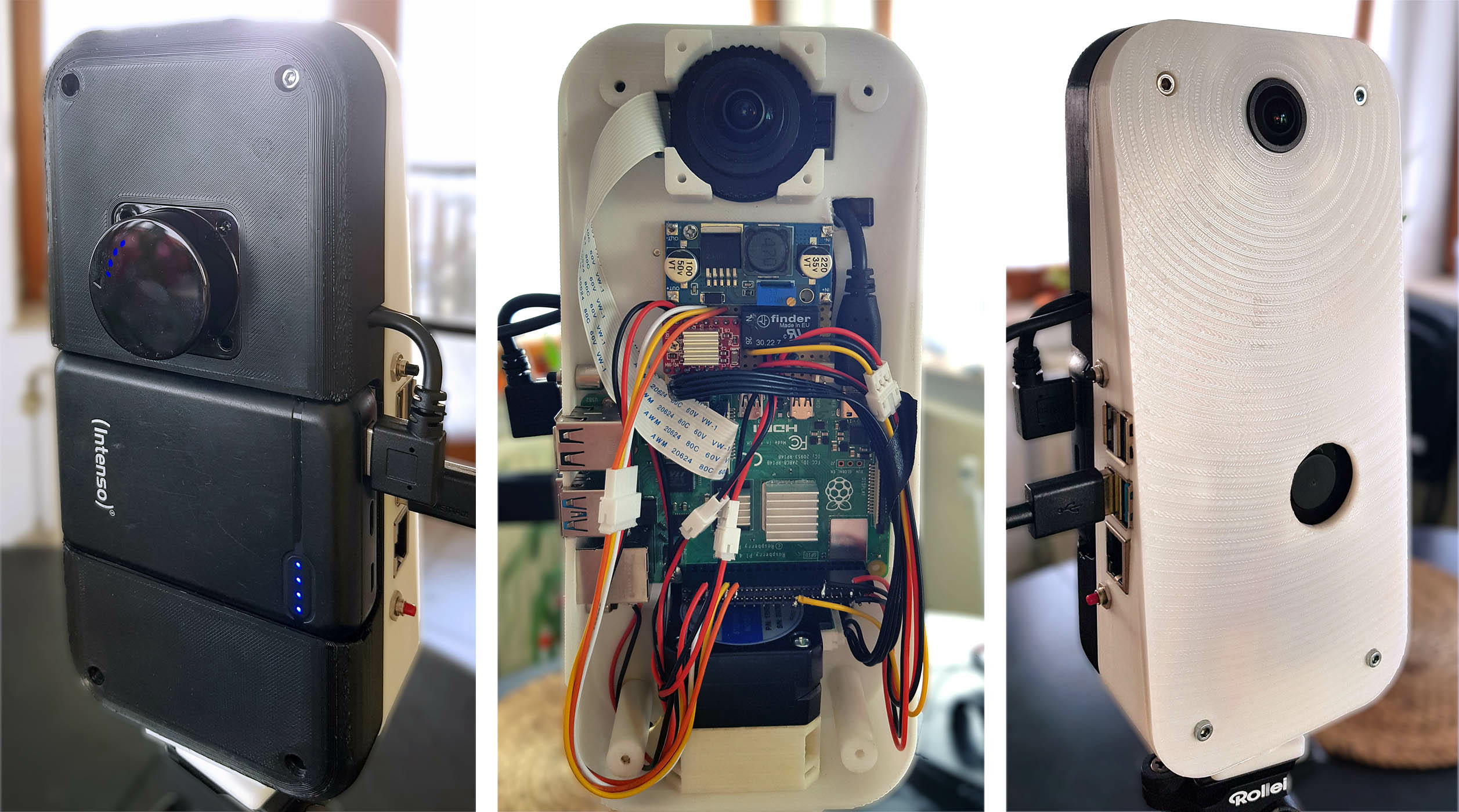
PiLiDARはRaspberry Pi 4にM12マウントHQカメラ、LDRobot LD06・LD19・STL27LなどのLiDARセンサー、ステッピングモーター、電源で構成されています。例えば、以下の画像は1万mAhのモバイルバッテリーと昇圧コンバーターを組み込んだPiLiDARです。
PiLiDARの中核機能は以下の3つ。
1:LiDARスキャン
PiLiDARは、LDRobot製のLiDARセンサーを用いて、周囲の空間を2次元的にスキャンし、そのデータをリアルタイムで取得・可視化する機能を備えています。センサーはRaspberry Piと接続され、シリアル通信およびハードウェアPWM制御により正確に制御されます。取得されたデータは、numpy配列やCSV形式で保存することが可能で、後処理や解析に柔軟に対応できます。また、センサーの回転にはステッピングモーターが用いられ、全周囲を自動でスキャンする仕組みが構築されています。
2:パノラマ撮影と合成機能
PiLiDARは広角レンズを用いて、360度の全方位画像をパノラマ撮影できます。撮影された複数の魚眼画像は、Huginというパノラマ写真合成ツールを用いて最大6K解像度の球状パノラマ写真に自動合成されます。合成過程では各画像のEXIF情報を用いて露出が均一化され、色補正も自動で行われるので、より自然な仕上がりになるとのこと。こうして得られたパノラマ画像は、後述の3D点群への色情報付加にも活用されます。
3:3Dシーン構築機能
PiLiDARは、取得したLiDARスキャンデータとパノラマ画像を統合することで、カラフルな3D点群を生成し、シーンとして再構成することができます。具体的には、点群の各頂点に対して、パノラマ画像から対応するピクセルの色情報を割り当てる処理が行われます。さらに、複数回のスキャン結果を位置合わせするために、グローバルレジストレーションとICP(Iterative Closest Point)による細かい調整が施されます。生成された3Dシーンは、Open3Dライブラリを用いて可視化でき、複数のフォーマットで出力することも可能です。
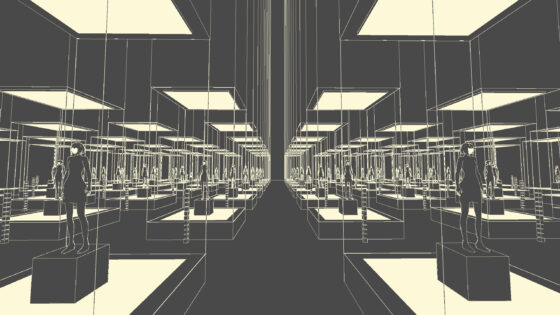
実際にPiLiDARでスキャンした結果は結果はこんな感じで、左右にドラッグすることで画像を回転させることができます。点群の強度がカラーマップで視覚化されています。
以下は、室内のパノラマ写真から点群に色情報を付与したスキャン結果。
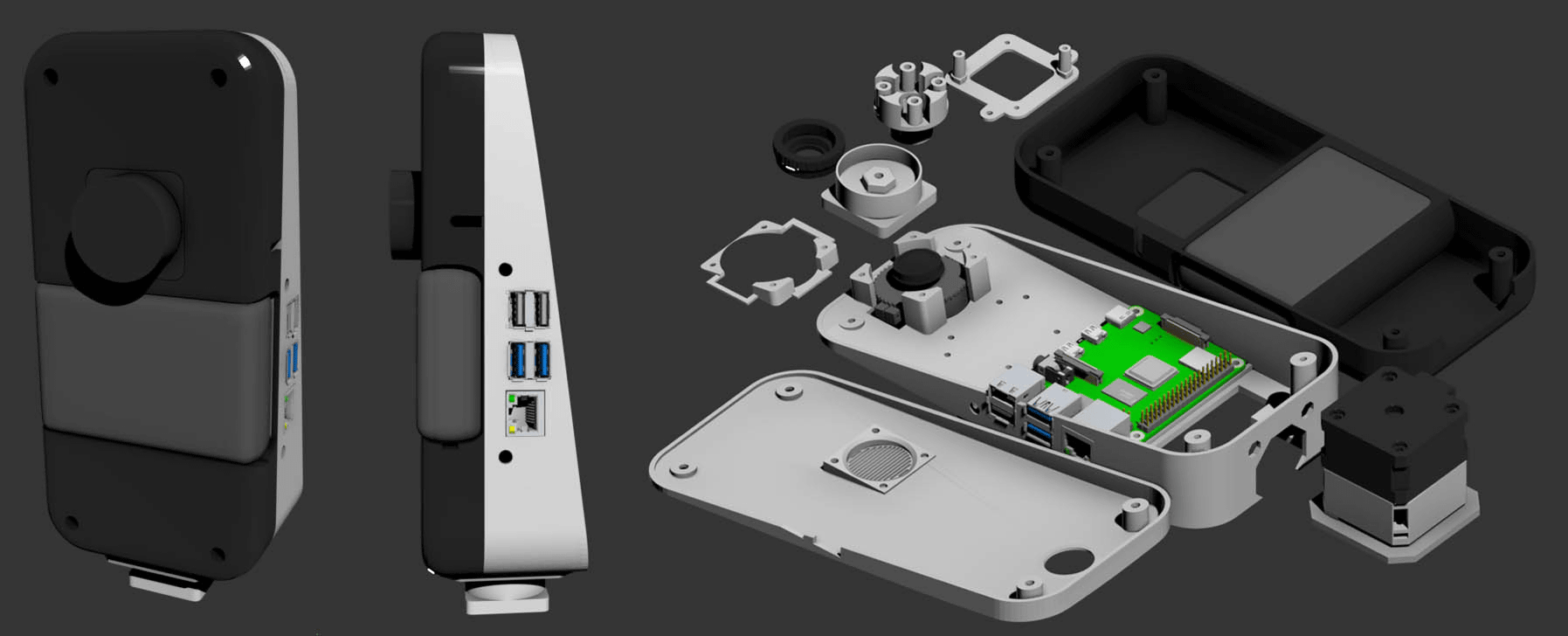
GitHubリポジトリにはソフトウェアやツールのほか、外装やステッピングモーター用ギアボックス、レンズアダプターの3Dプリンター出力用データがホストされています。
なお、ソーシャルニュースサイトのHacker Newsのユーザーによれば、電源とコンバーターと3Dプリンターのフィラメント以外の必要な部品の総額を試算するとおよそ200ドル(約2万9000円)~280ドル(約4万円)になるとのことでした。
この記事のタイトルとURLをコピーする

Be the first to comment