


@mobi Open Trial Kitは弊社が設計したAMR台車です。30×30×25 cmくらいの小型台車で気軽に持ち運び、実験ができることをコンセプトにしています。詳しくは下記をご覧ください。
本記事から7回ほどに渡って、@mobi Open Trial Kit 1.0の組み立てから自律移動までの工程を紹介します。記事では弊社が開発している自律移動ロボット向け ソフトウェアパッケージ「@mobi」を用いて@mobi Open Trial Kitの自律移動を実現しています。@mobiの詳細については下記をご覧ください。
@mobiの機能は下記からもご覧いただけます。

部品調達
@mobi Open Trial Kitを組み立てるにあたり、部品を皆様に自ら調達していただく必要があります。
下記リポジトリ内のopen_trial_kit_parts.xlsxを参考に、必要な部品を揃えてください。
3Dプリンタ出力
今回は下表の部品を3Dプリンタで出力しました。3Dプリンタを使う場合は組み立て前に出力しておくとスムーズに組み立てが進められるかと思います。meviyにて注文することもできます。
| 部品名 | 見た目 | 個数 |
|---|---|---|
| モータースペーサー MVBLK-ABN-3Y6-U1AJ9 |
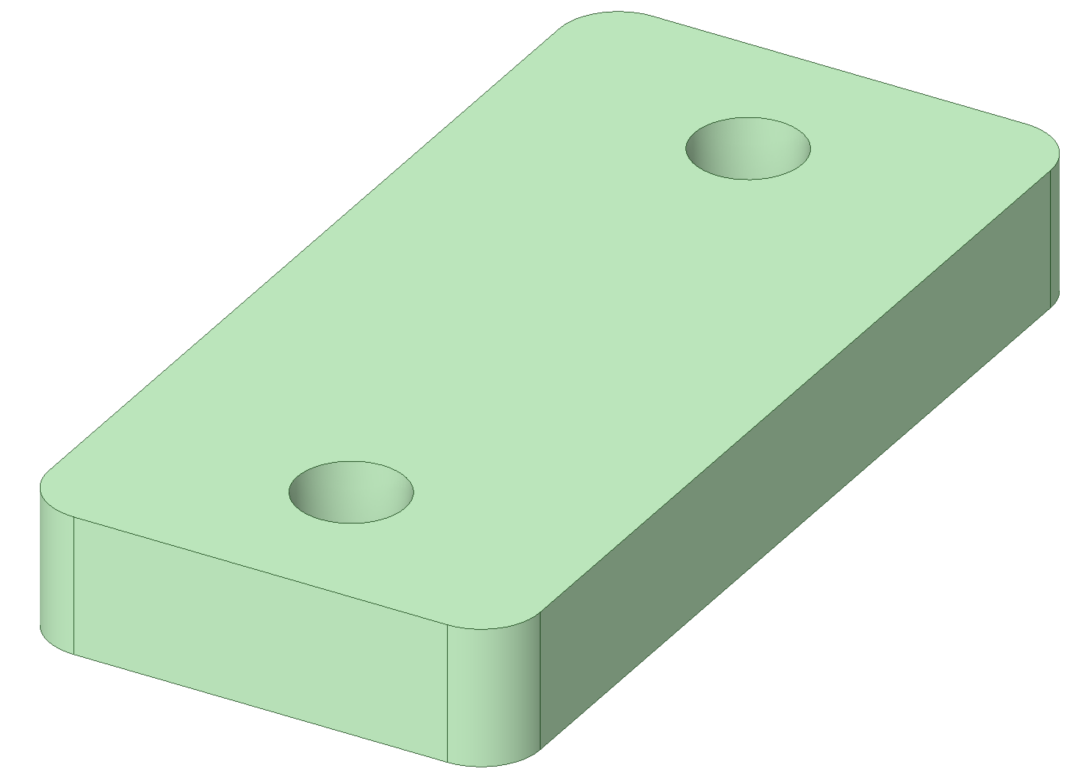 |
2 |
| モータースペーサー2 MVBLK-ABN-3Y6-Y89JW |
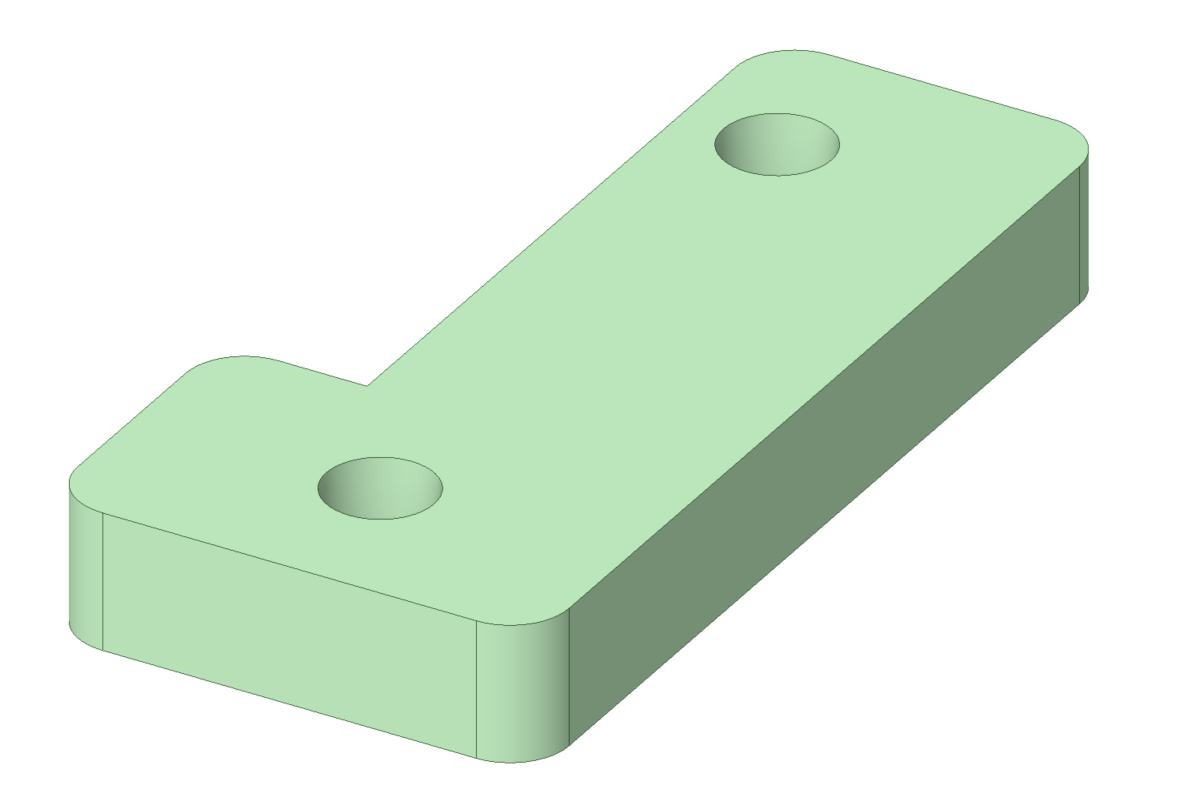 |
2 |
| コネクタースペーサー MVBLK-ABN-3Y6-E6DKS |
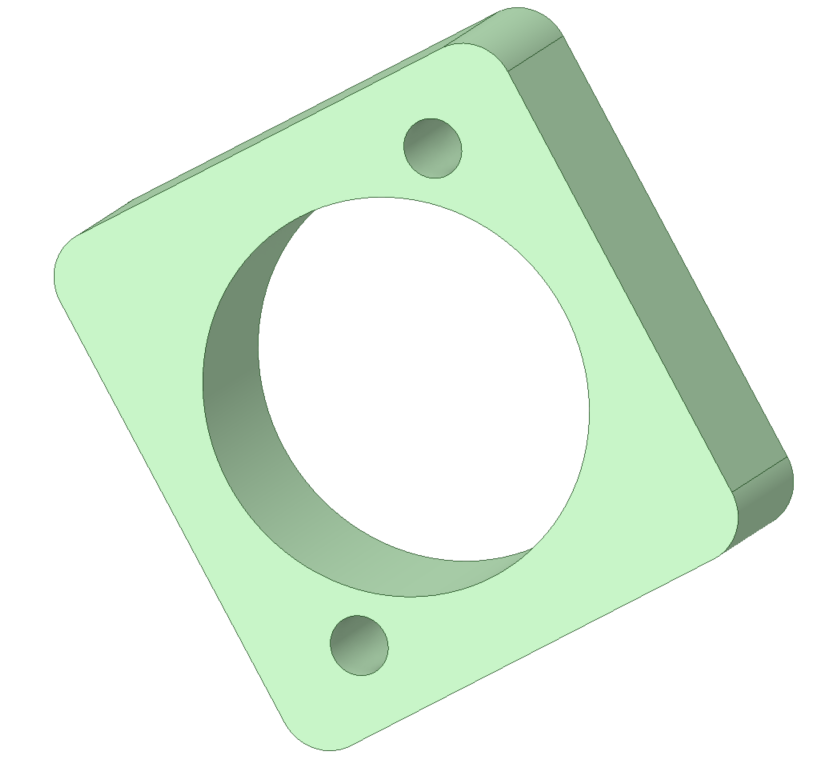 |
1 |
出力した部品は下図の通りです。
では、次回から実際の組み立てに移っていきます!
Views: 0

{kind=link}