






歯車の代わりに「ロープ」を使ったロボット犬「CARA」が登場
2025年7月25日、YouTuberのAaed Musa氏が独自に開発したロボット犬「CARA」が注目を集めています。CARAは他のロボットとは異なり、動力伝達に歯車やプーリを使用せず、ロープを利用して動きます。この革新的な設計は、Musa氏のYouTubeチャンネルでその製作過程や動作を確認できます。
CARAの驚くべき仕組み
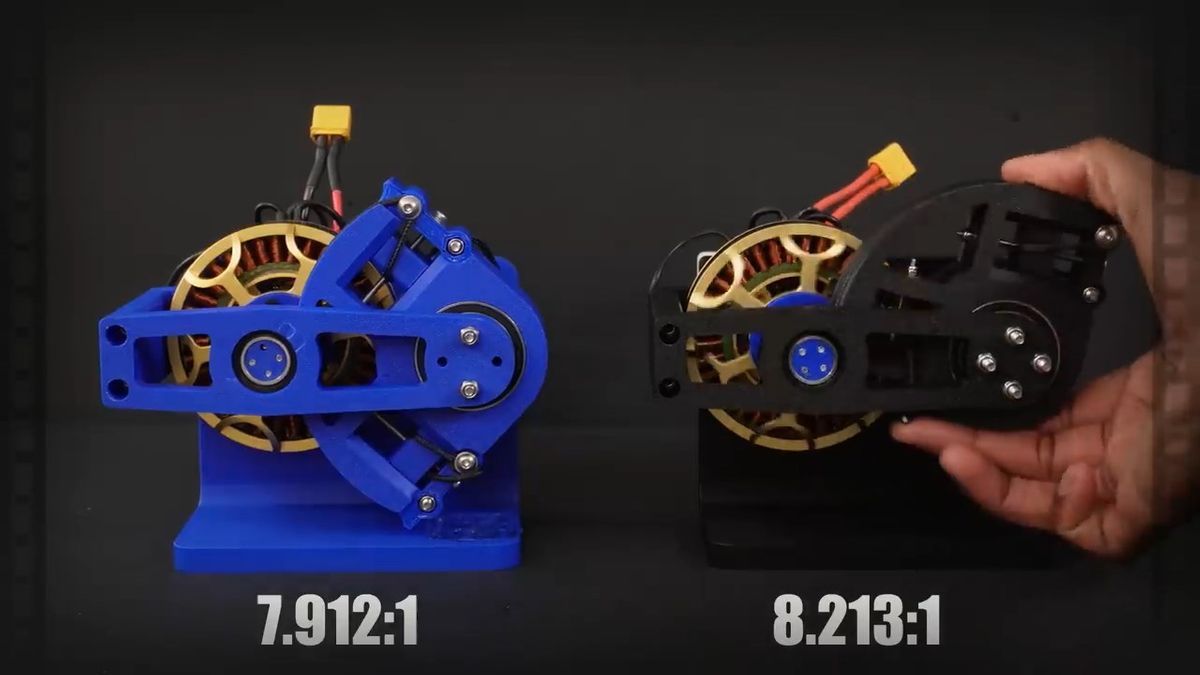
CARAの名は「Capstans Are Really Awesome」の頭文字に由来し、キャプスタンという帆船で使われるウインチが動力伝達に活用されることから名付けられました。この技術により、非常に高精度な動力伝達が実現されています。
CARAは約1年前に開発されたキャプスタン・ドライブの技術を応用しています。一般的な歯車を使用する代わりに、ロープでトルクを伝達できる仕組みです。
技術的特徴と開発の過程
Musa氏は、軽量で高強度の専用ロープ「Dynamica DM20」を使用し、ロープの伸びを抑えることに成功しています。これにより、ロボットの動作は非常に精度が高く、低コストでの製作が可能となります。
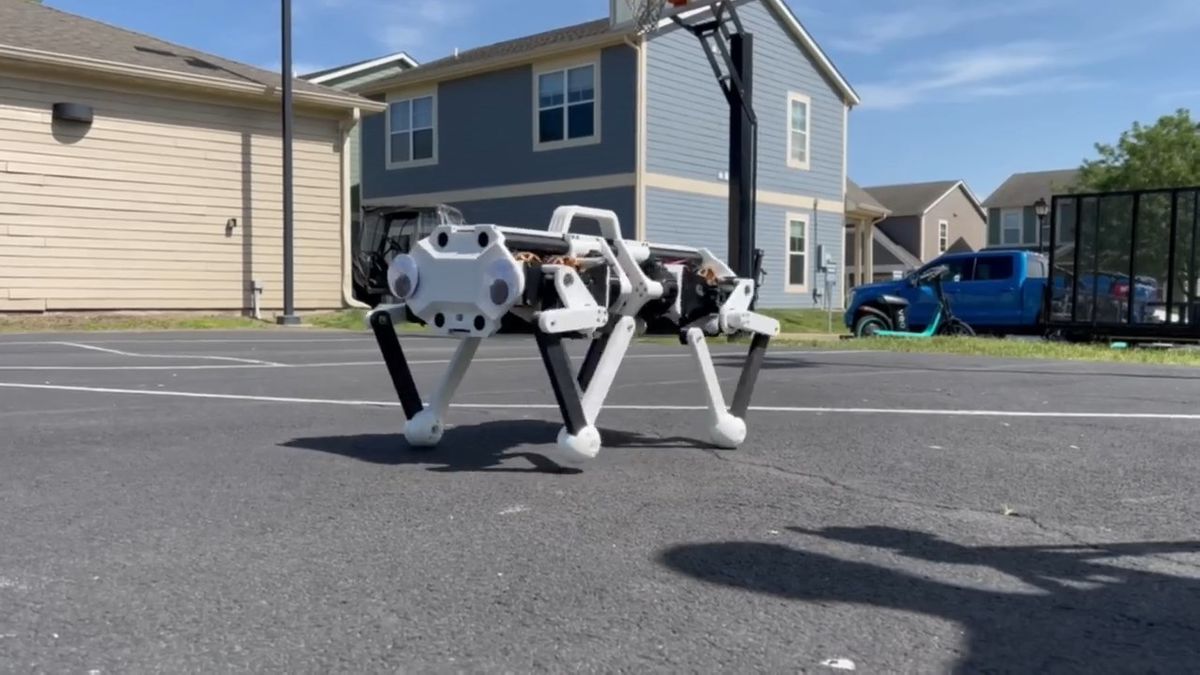
ロボットの脚には5バー脚設計が採用されており、制御にはシャープな動作を可能にするPJRC Teensy 4.1マイクロコントローラーが使用されています。
成功と課題
開発過程では、CARAが外でテストした際に脚が壊れ、強度改善が必要とされました。それでも、Musa氏はCARAのバランス検出能力を向上させることで、動作の安定性を高めました。
CARAの完成後、前後左右に自由に動き、その場でジャンプしたり、横向きに移動したりすることも可能です。
今後もMusa氏はCARAのアップデートを続け、設計ガイド付きの小型バージョンを公開する計画だと述べています。
このプロジェクトは技術革新を示すものであり、ロボット工学の新たな可能性を提示しています。興味のある方は、ぜひMusa氏のYouTubeチャンネルで動作を確認してみてください。
この内容は、最新の技術革新に焦点を当て、読者にわかりやすく紹介することを目指しました。
🧠 編集部より:
補足説明と背景情報
ロボット犬「CARA」についての詳しい説明
ロボット犬「CARA」は、従来の歯車やプーリの代わりにロープを使用して動力を伝達する革新的なロボティクスプロジェクトです。このアイデアは、複雑な機構を簡素化し、重量を軽減することを目的としています。この方式は、特に精度が要求されるロボット工学において、新たな展望を開く可能性があるとMusa氏は述べています。
CARAの名前の由来
「CARA」は「Capstans Are Really Awesome」の頭文字を取ったもので、キャプスタンを用いる設計理念を反映しています。キャプスタンとは、伝統的に帆船で用いられるウインチで、動力伝達の効率化に役立つメカニズムです。
技術的な背景
- キャプスタン・ドライブ: CARAの核心はキャプスタン・ドライブにあります。従来の歯車を用いず、ドラムとロープでトルクを伝えるこの設計は、ロボットが動作する際の遊び(バックラッシュ)が少ないため、高い精度が求められる動作が可能です。
- モーターと制御システム: CARAには大型ドローン用のブラシレスモーターと高性能のコントローラーが搭載されており、位置・速度・トルクの制御が精密に行えます。
背景知識
- ロボット工学の発展: 現代のロボット工学は、従来の機械的構造から、より柔軟で応用範囲の広い設計へと進化を遂げています。この変化は、自律型ロボットや、災害救助、医療分野での利用など、多様な場面での活用を後押ししています。
- オープンソースの重要性: Musa氏は、CARAの設計ガイドを公開し、コミュニティ全体で技術を共有・発展させることを目指しています。これにより、多くのエンジニアや愛好者がこの技術を利用し、自身のプロジェクトに応用できるようになります。
関連リンク
このように、CARAの研究と開発は、技術革新とオープンソースの可能性を両立させる非常にエキサイティングなプロジェクトです。今後の進展に注目が集まります。
-
キーワード:CARA
このキーワードは、歯車の代わりにロープを用いて動力を伝達するロボット犬「CARA」に関連しています。
※以下、出典元 ▶ 元記事を読む
Views: 2

{kind=link}